AnsleyS
Senior Member
Garmin devotes most of their sonar marketing to fishermen but we have put together a Garmin system on our Krogen 42 and are evaluating it for cruising. We bought a 1983 Krogen and removed the old electronics and installed a Garmin system with three multifunction screens, a GPSMap 8616xsv, GPSMap 8612xsv, and a GPSMap 7407xsv. The “xsv” suffix indicates that the screen can receive and display high definition sonar signals. The system also includes a GMR Fantom 24-inch radar dome, a AIS 800 Transceiver, an autopilot with the Reactor 40 compass, the GHP Smart Pump v2 and the GHC20 control head in the pilothouse. These are connected with the NMEA200 hub and a high speed network through the GMS-10 Network Port Expander. There is an AIS antenna on the mast and an external GPS antenna for the AIS. There is a GC200 IP camera covering the stern and two VHF radios with position data vis our only NMEA0183 connection. The sonar transducers are the GTS1M-THP which are a pair mounted on either side of the keel and are an all-in-one transducer set for (1) mid-range CHIRP traditional, (2) higher frequency “ClearVu” and (3) a flexible frequency side view. Also mounted is a forward scanning sonar with the Panotix PS51-TH transducer. This system has so many data paths that I needed to map it for clarity.
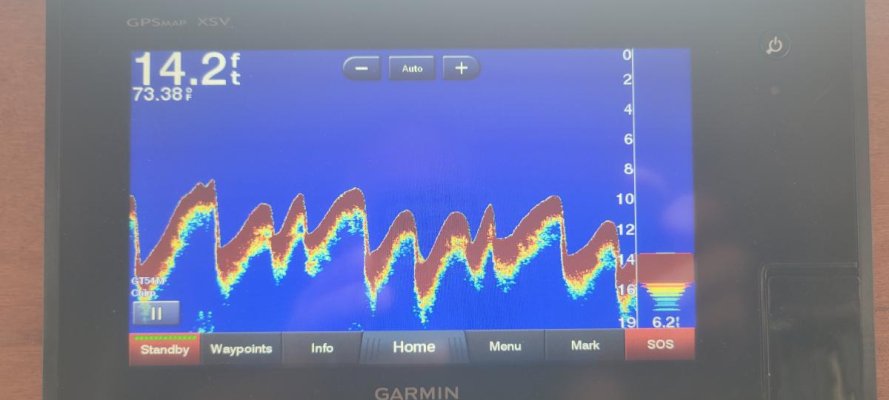
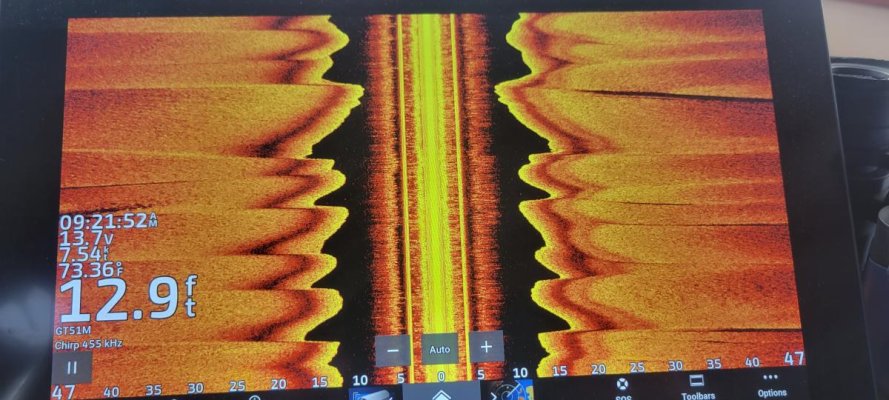
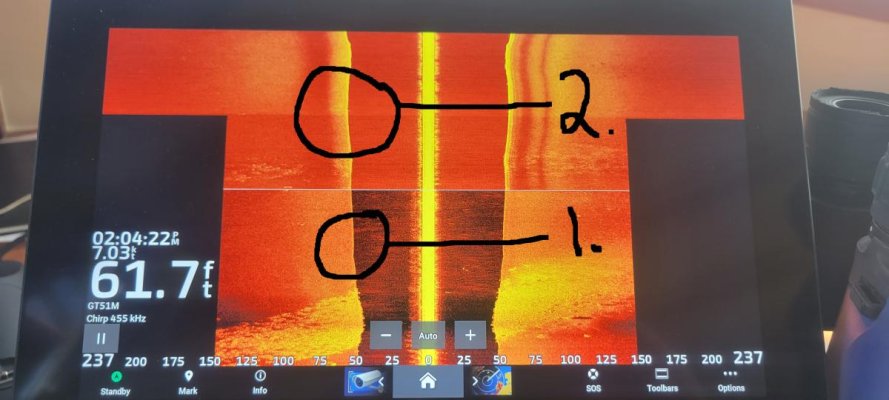
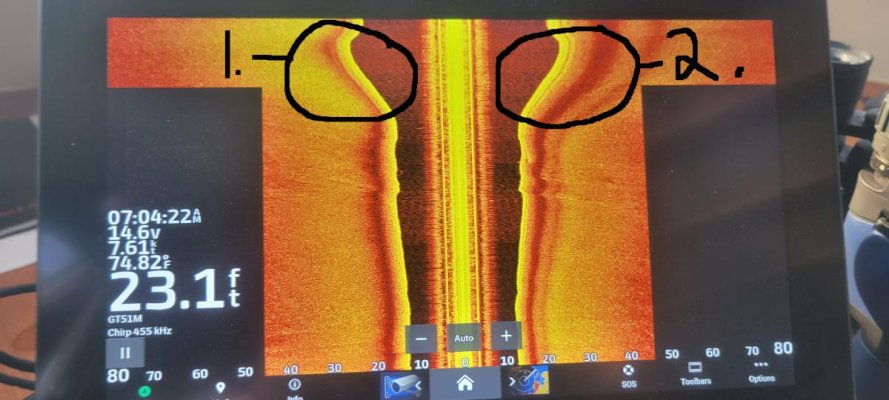
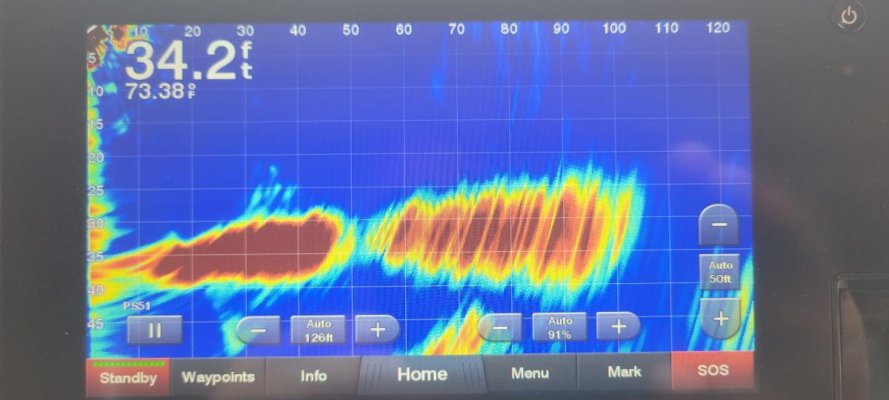
As we started to use this system, we started to experiment with the different views and their use and then we started to vary the frequency of the transmission and found some interesting things. We started to be able to scan an anchorage to look at the bottom before setting the hook and we started to wonder if we could judge the density of the bottom using different frequencies. This is an ongoing project so I welcome your thoughts along the way.
As we started to use this system, we started to experiment with the different views and their use and then we started to vary the frequency of the transmission and found some interesting things. We started to be able to scan an anchorage to look at the bottom before setting the hook and we started to wonder if we could judge the density of the bottom using different frequencies. This is an ongoing project so I welcome your thoughts along the way.